


一、文件的备份/加载设备
机器人控制器可以使用的备份/加载设备有: 1)Memory Card(MC卡)
2)U盘
3)PC机
二、文件类型
文件是数据在机器人控制柜存储器内的存储单元。 控制柜主要使用的文件类型有: 1)程序文件(*.TP)
2)默认的逻辑文件(*.DF)
3)系统文件(*.SV)) 用来保存系统设置
4)I/O配置文件(*.I/O) 用来保存I/O配置
5)数据文件(*.VR) 用来保存诸如寄存器数据
6)记录文件(*.LS) 用来保存操作和故障记录
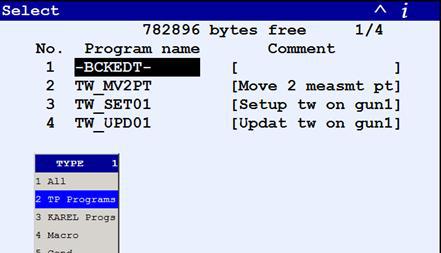
1.程序文件(.TP)
程序文件被自动存储于控制器的 CMOS(SRAM)中,通过 TP 上的 【SELECT】 键 → 按 F1选择 TP Program 就可以显示程序文件目录 。
2.默认的逻辑文件(.DF)
默认的逻辑文件包括在程序编辑画面中 , 各个功能键(F1‐F4)所对应的默认逻辑结构 的设置。
1)DEF_MOTNO.DF F1键
2)DF_LOGI1.DF F2键
3)DF_LOGI2.DF F3键
4)DF_LOGI3.DF F4键
3.系统文件 (.SV)
1)frameVAR.SV 用来保存坐标参考点的设置
2)SYSDNET.SV 用来保存DeviceNet网络配置
3)SYSframe.SV 用来保存用户坐标系和工具坐标系的设置
4)SYSMAST.SV 用来保存Mastering数据
5)SYSMACRO.SV 用来保存宏命令设置
6)SYSPASS.SV 用来保存用户密码数据
7)SYSPRESS.SV 用来保存压力数据
8)SYSSERVO.SV 用来保存伺服参数
9)SYSVARS.SV 用来保存坐标,参考点,关节运动范围,抱闸控制等相关变量的设置
4.I/O配置文件
1)DIOCFGSV.IO 用来保存 I/O配置数据
5.数据文件
1)NUNREG.VR 用来保存寄存器数据
2)POSREG.VR 用来保存位置寄存器数据
3)PALREG.VR 用来保存码垛寄存器数据
6.记录文件
1)ERRALL.LS 用来保存错误履历
2)LOGBOOK.LS 用来保存一段时间内的操作记录
三、文件备份/加载方法的介绍
1.何为备份/加载
如下图所示:将文件从机器人控制柜中导出到其它外部储存设备中即为备份; 将文 件从外部储存设备中导入到机器人控制柜中即为加载。

2.一般模式下的备份/加载方法
1)一般模式下的备份 备份步骤:**步选择确定存储设备;第二步在所选存储设备中创建文件夹;第三步选
择备份的类型并将文件备份到所创建的文件夹中。 样例演示:(以选择 Memory Card 为例)
(1)按 【MENU】(菜单)→7【FILE】(文件)→F5【UTIL】(功能)出现如下图画面:

Set Device(设定装 置):存储设备设置;
Format(格式化):存 储卡格式化;
Make DIR(制作目录): 建立文件夹;
(2) 移动光标选择【Set Device】(设定存储设备),按【ENTER】(回车),出现如下 画面:

Mem Card(MC): CF 卡;
Mem Device(MD): 内部存储设备;
USB Disk(UD1): 控制柜上的 USB 输 出设备;
USB on TP(UT1): TP 上的 USB 输出 设备;
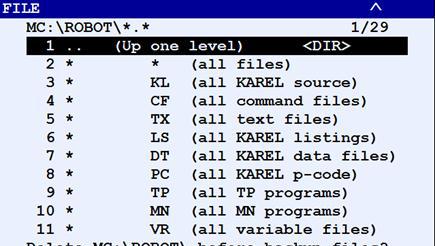
(3)选择存储设备类型,如 Memery Card(MC),按【ENTER】(回车),出现如下画面:
(4)新建文件夹,按 F5 【UTIL】功能,移动光标选择 【Make DIR】 (制作目录), 按 【ENTER】(回车),出现如下画面:

(5)移动光标选择输入类型,用 F1 到 F5 或数字键输入文件夹名(Eg:ROBOT),按
【ENTER】(回车),出现如下画面:

目前路径为: MC\ROBOT\,把光标移 至(Up one level(返 回上目录) 行,按
【ENTER】(回车),可退回前一个目录
(6)按 【F4 BACKUP】(备份),出现如下画面:
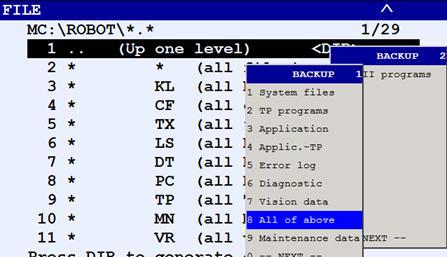
System files(参数文件):系统文件 TP programs(TP程序):TP程序
Application(Application(应用)):应用文件 Applic.‐TP(Applic.‐TP):TP应用文件 Error log(异常履历):报警文件 Diagnastic(诊断):诊断文件
All of above(全部的):全部
ASCII program:备份出来的文件均为.LS 格式,可用记事本打开 Image backup:镜像备份(只有 R-30iA、R‐J3iC 控制柜才有这项)
(7)选择 8 All of above,按【ENTER】(回车),显示如下画面:
首先会让你选择是否删除文件夹中的备份文件,然后才要求备份,连按两次 F4 即可。 当屏幕显示文件保存成功,即备份完成。
2)单个文件的备份 备份步骤:**步确定机器人内部存储位置;第二步从内部存储位置中找出所需备份的
文件;第三步选择选择将要存储的位置。 样例演示:(以某个 TP 文件为例)
(1)按 【MENU】(菜单)→7【FILE】(文件)→F5【UTIL】(功能)选择MD设备,出现 如下图画面:

(2)选择文件,按 F2【DIR】,出现各种文件类型,如下画面:
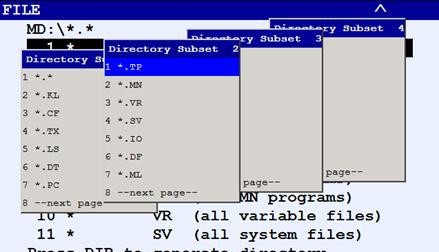
(3)选择文件类型为 TP,按【ENTER】(回车),并在画面中选中你需要备份的文件。

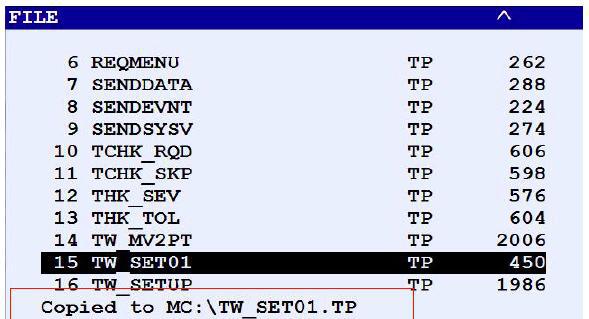
(4)按 F2【COPY】,出现如下画面:

(5)将文件将要存储的设备和文件夹名选好后,按 F1【DO_COPY】,出现如下画面即备份成功。
3)一般模式下的加载 加载步骤:**步选择需要加载的文件的外部存储设备;第二步从外部存储设备中找出
所需加载的文件;第三步加载文件。 样例演示:(以加载某个 TP 文件为例)
(1)按 【MENU】(菜单)→7【FILE】(文件)→F5【UTIL】(功能)选择外部输入设备
(如:MC),出现如下图画面:

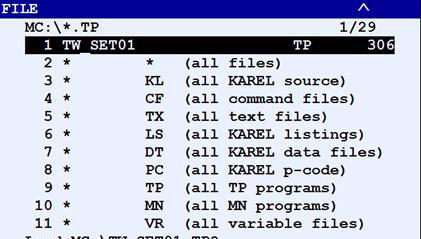
(2)选择文件,按 F2【DIR】,出现各种文件类型之后,选择*.TP,按【ENTER】(回车) 出现 TP 文件画面如下:

注:选择 【*.*】显示该目录下的所有文件
(3)选中需加载文件后,按 F3【LOAD】(载入),出现如下画面:
屏幕中出现“Load MC: TW_SET01.TP?”(TW_SET01.TP 文件要载入吗?) F4 【YES】(执行):确认
F5 【NO】(取消):取消操作
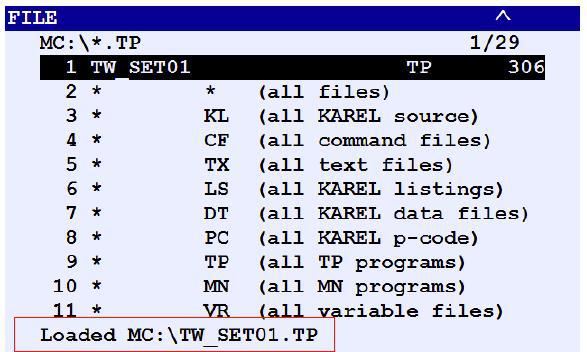
(4)加载完成,屏幕出现下画面:
注:若控制器RAM中有同名文件存在,则在第三步中会出现如下画面:

F3 【OVERWRITE】(重写):覆盖原有文件
F4 【SKIP】(忽略):不覆盖,跳到下一个文件
F5 【CANCEL】(取消):取消操作 选择适合的项,加载文件。
了解更多机器人咨询请点击:发那科机器人
